Hello,
I'm not sure about how the Yaskawa drives compensate for the analog offset What I usually do in these situations is pull your motor off the machine so you can see the motor shaft. Tighten a tie wrap to the motor shaft with the tail still on it. You may want to shorten the tail to keep it from hitting anything as it spins. Tape some masking tape to your motor face so you can mark the position of the tail at the beginning and the end of the moves.
You may want to change your system resolution so you're using either encoder counts or revolutions as your position units so you're sure there are no rounding errors.
After powering up the system and enable the motor and enabling the axis, command a ten revolution move in + direction. Now mark the position of the tail. Go 10 more revs in the + dir and mark that ending point. I'm going to guess the two marks will be the same. Note the analog commmand voltage at the end of each move.
Now do the same but in the - direction two time marking each time and noting the analog voltage each time.
If everything is consistent all four tail positions will be the same. However if the +direction end points are different from the - direction end points. You may have a "deadband" parameter programmed into your drive to alleviate analog noise.
Do the same thing again and try to rotate the shaft by hand at each stop point. I'm guessing it will be rock steady and resisting motion in either direction. If that is the case then you for sure have a deadband in your drives analog processing. It may be programmable so you could minimize it to reduce the effect.
Many digital drives with analog inputs now have an analog deadband and some are not programmable so you get what you get.
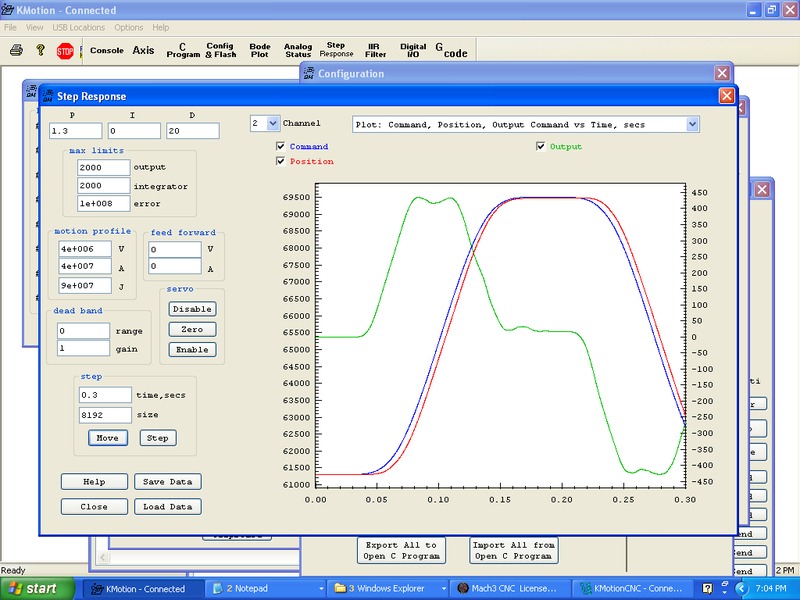
Many digital drives operate internally like a position controller because they monitor the encoder feedback and don't have a DC tach for velocity feedback like the pure analog servos had. With an analog input the digital drive it will go precisely the commanded speed for that analog command value. With zero V command it not only delivers zero speed, they also hold their position even without an external position loop.
To prevent 0 speed jitter, there is an analog deadband where the drive simply ignores any voltage less than ...say .020 volts but it considers any voltage from 0 to 0.020 as zero speed so it hold the motor steady. Unfortunately the CNC control expects the motor to move even at .005 volts. so the error builds up until it gets high enough to cause rotation and the analog output stays at the voltage that first caused motion. This type of deadband will cause machining problems due to the lack of response at the low speeds. " I "gain will pull the motor into position at the end of the move.but it cannot correct the reversing error during machining.
| Group: DynoMotion |
Message: 9397 |
From: sparky300013 |
Date: 4/10/2014 |
| Subject: Re: KFLOP and Kanalog servo tuning. |
|
Yaskawa sigma II and sigma V have a balance adjustment. FN-00A spd. Set your axis to 0Volt output on the dac. watch the encoder count on the Kflop and adjust FN-00A until the encoder count is very minimal. If the axis is disabled the drive should be disabled, that will prevent the drift until the axis is enabled again.
|
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}